Veicolo Sperimentale
Il veicolo elettrico è dotato di quattro motori, uno per ruota, con telaio di concezione automobilistica. Il sistema di accumulo è composto da batterie agli ioni di litio con un’autonomia di circa 50 km. Il veicolo è gestibile in modalità drive-by-wire, ovvero tramite computer, negli aspetti di accelerazione, frenata, sterzo ed è dotato di sensori quali telecamere, lidar, accelerometri e GPS.
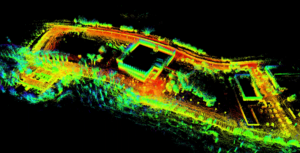
Nella Smart Road è prevista la circolazione di un veicolo elettrico sperimentale, un quadriciclo, sia in modalità teleguidata che autonoma. Il veicolo sperimentale è stato adattato in modo da poter essere guidato in modalità by-wire ovvero controllandolo da computer, con l’obiettivo finale della guida autonoma. E’ dotato di tre telecamere gigabit, radar frontale, lidar a 360°, GPS, odometri, unità inerziale, con dispositivi di sicurezza per l’arresto del veicolo remotamente o a bordo e con capacità di comunicazione via radio. Il software basato su ROS (Robot Operating System) controlla lo sterzo, i freni, l’acceleratore e legge tutti i sensori rilevanti. Gli algoritmi e le strategie per rendere autonomo il veicolo hanno come scopo il fornire al robot la capacità di localizzazione, di mappatura e navigazione. In particolare, si utilizzano algoritmi di Odometria Visiva e Visivo-Inerziale e SLAM (Simultaneous Localization And Mapping, localizzazione e mappatura simultanee) per stimare posizione ed orientamento del veicolo elaborando i flussi di immagini raccolte dalle telecamere. Queste stime basate sulla visione sono perfezionate fondendole con approcci di localizzazione e mappatura che si basano su sensori di distanza tramite Odometria Lidar-inerziale.
Referente
Andrea Zanela

